Location: London, England
Type: Living Pavilion
Year 2020
Teamwork: CHUN-HAO HSU, Mariem Afify, Niu Hanrui, Raisya Hidayat
Note: The Graduated Design Of The Bartlett Architectural School
Type: Living Pavilion
Year 2020
Teamwork: CHUN-HAO HSU, Mariem Afify, Niu Hanrui, Raisya Hidayat
Note: The Graduated Design Of The Bartlett Architectural School
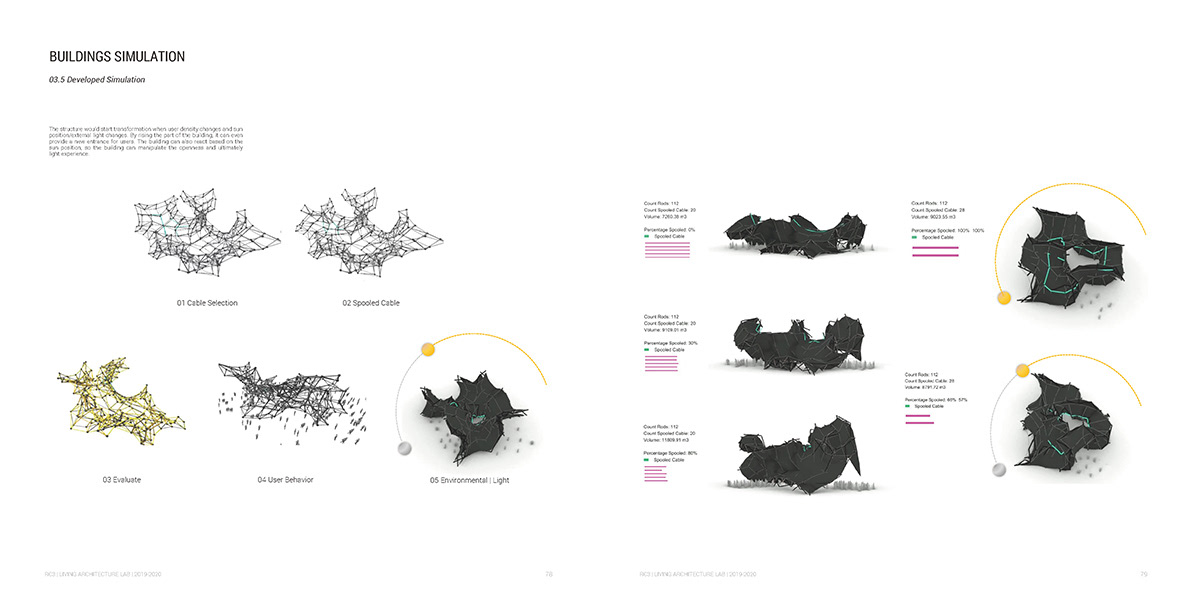
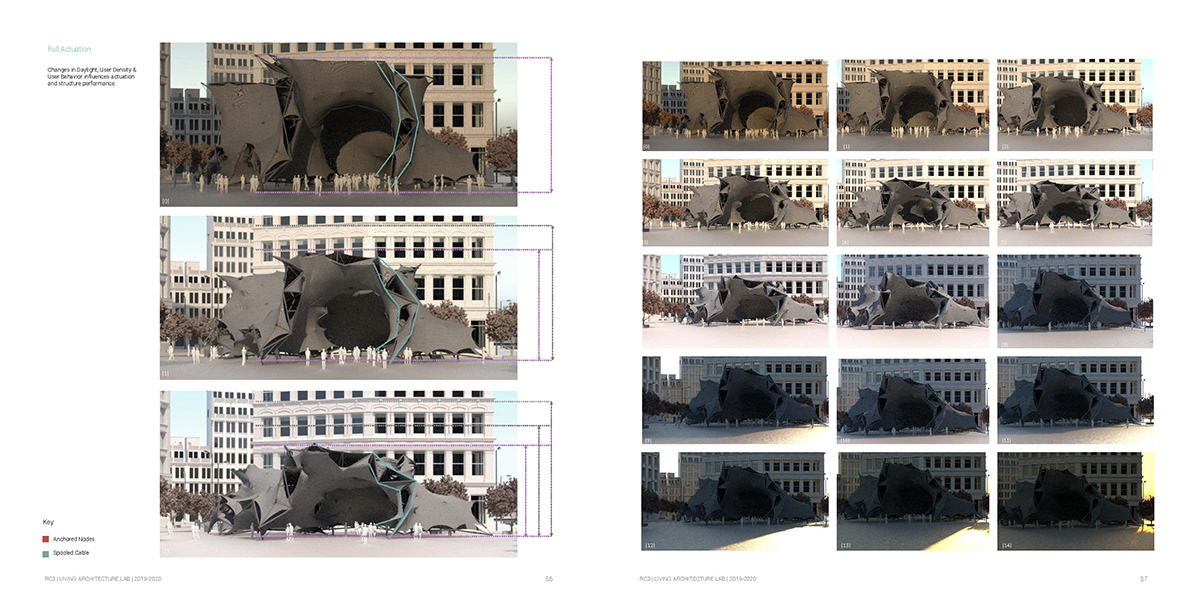
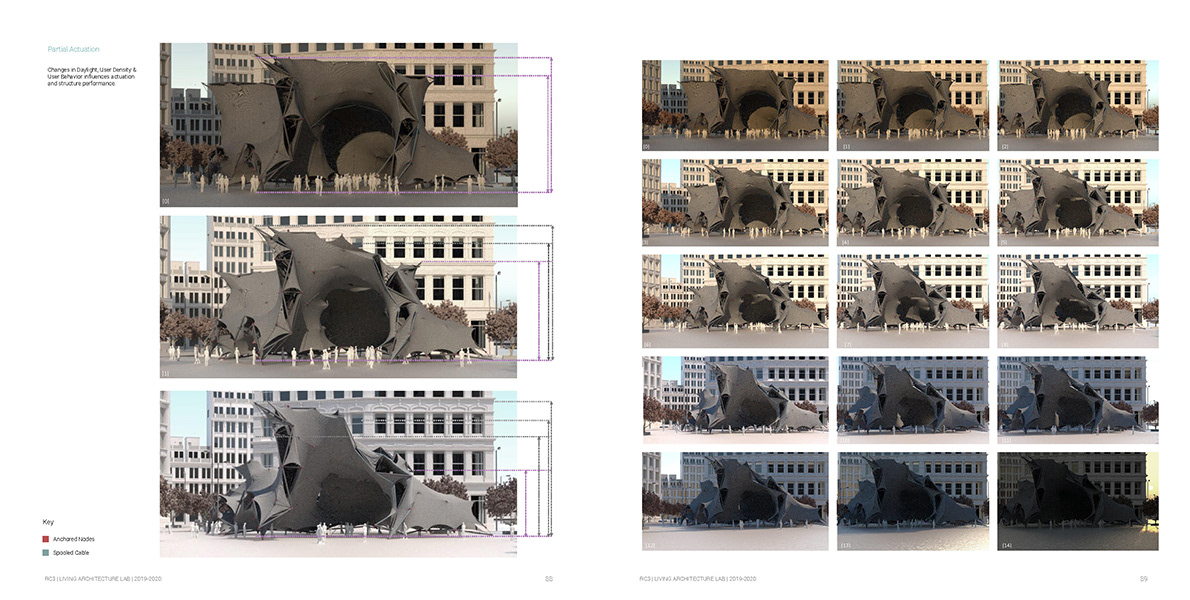
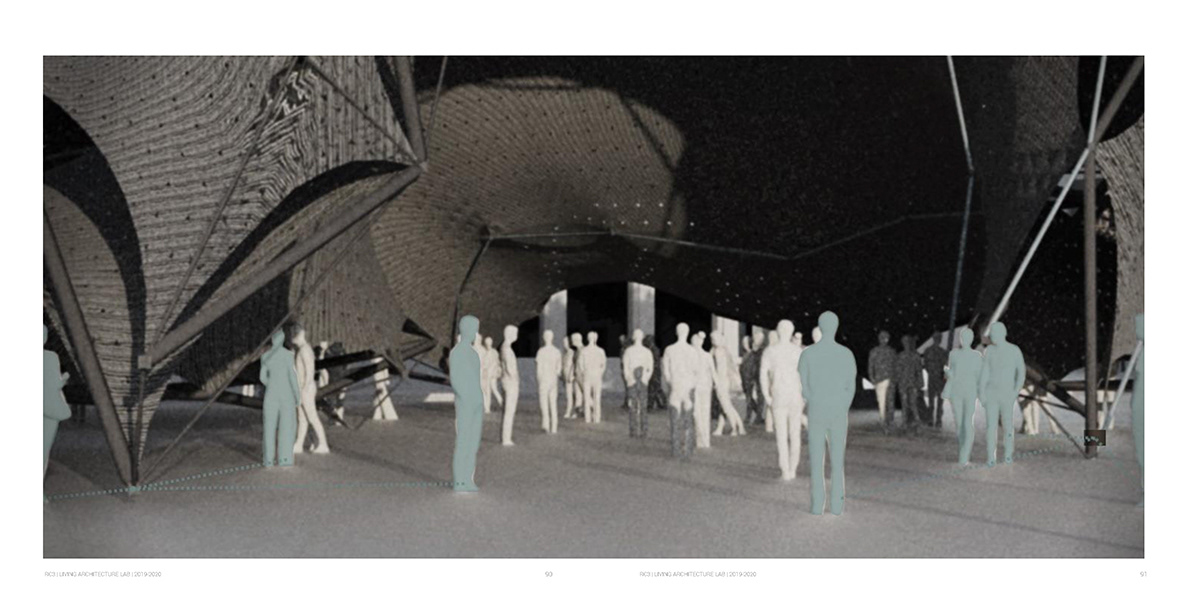
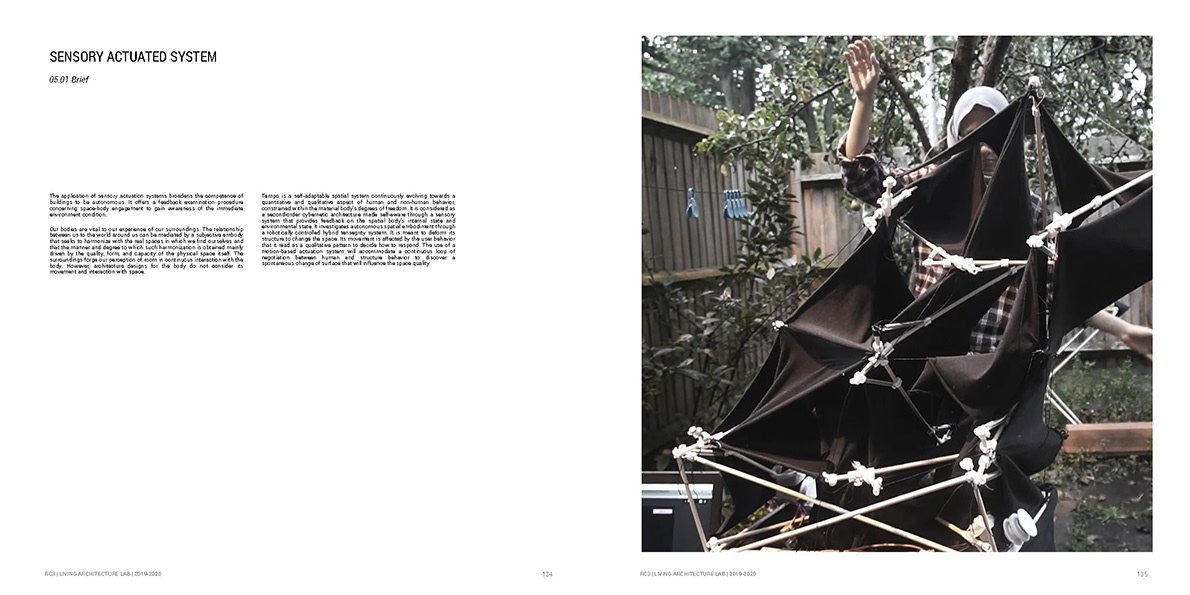
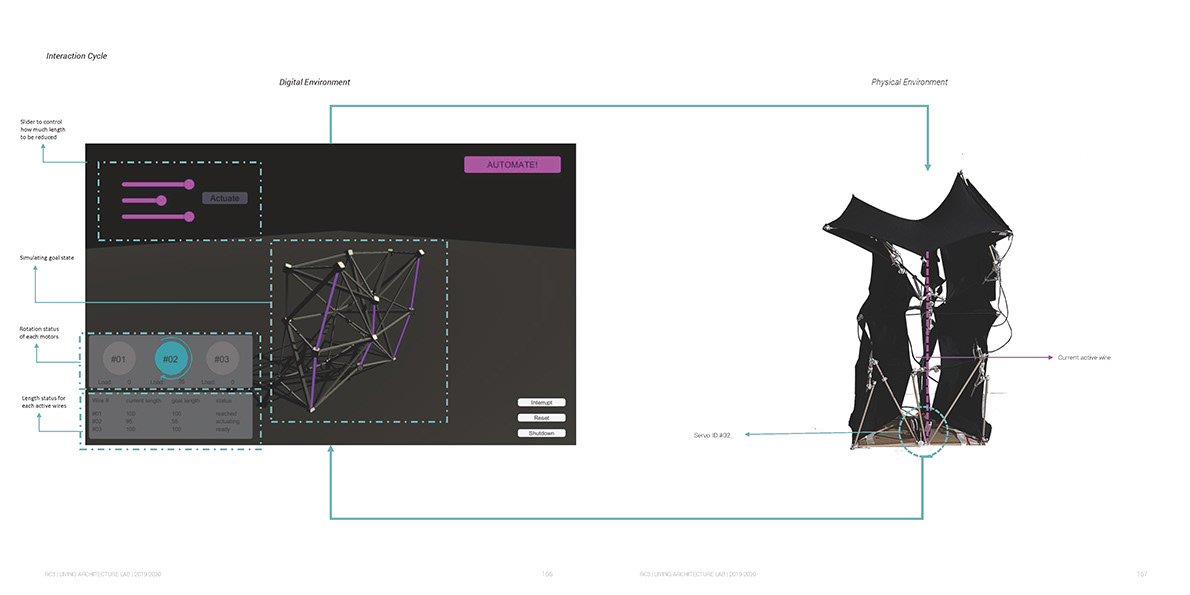
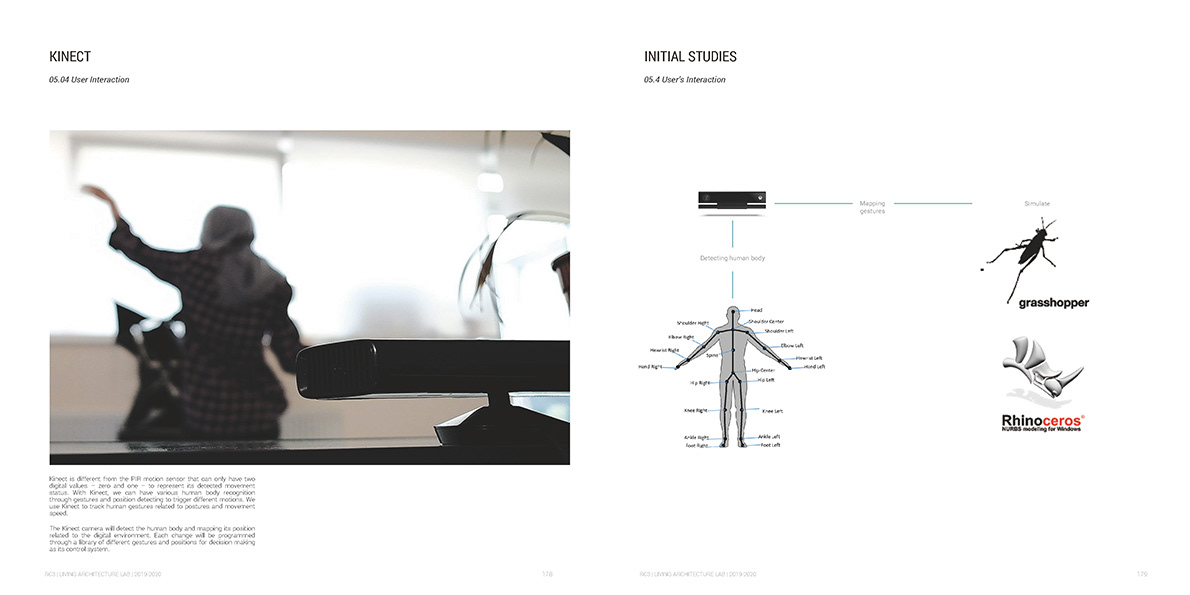
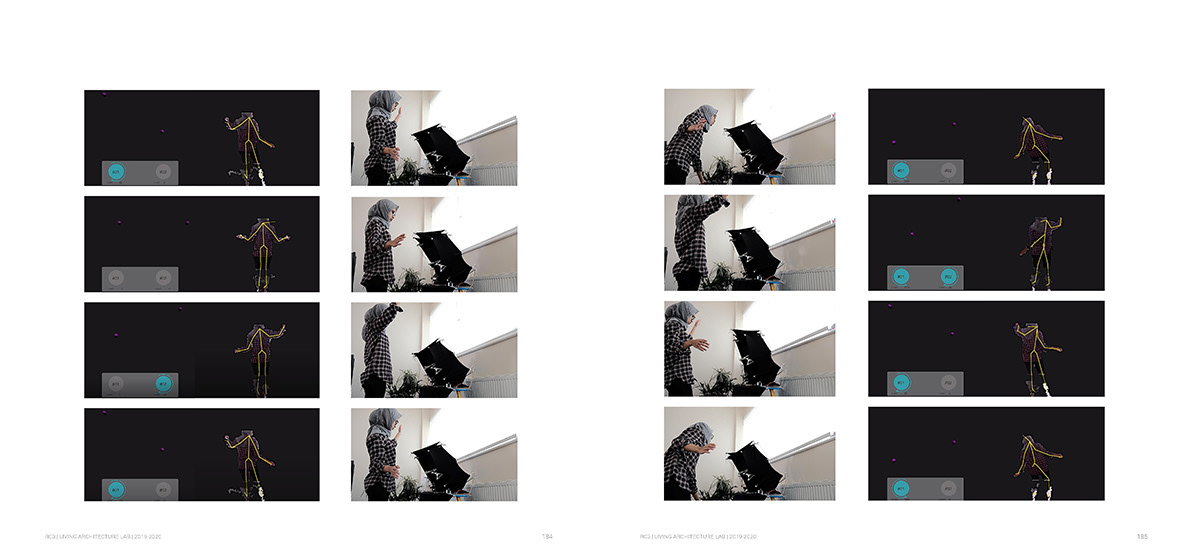
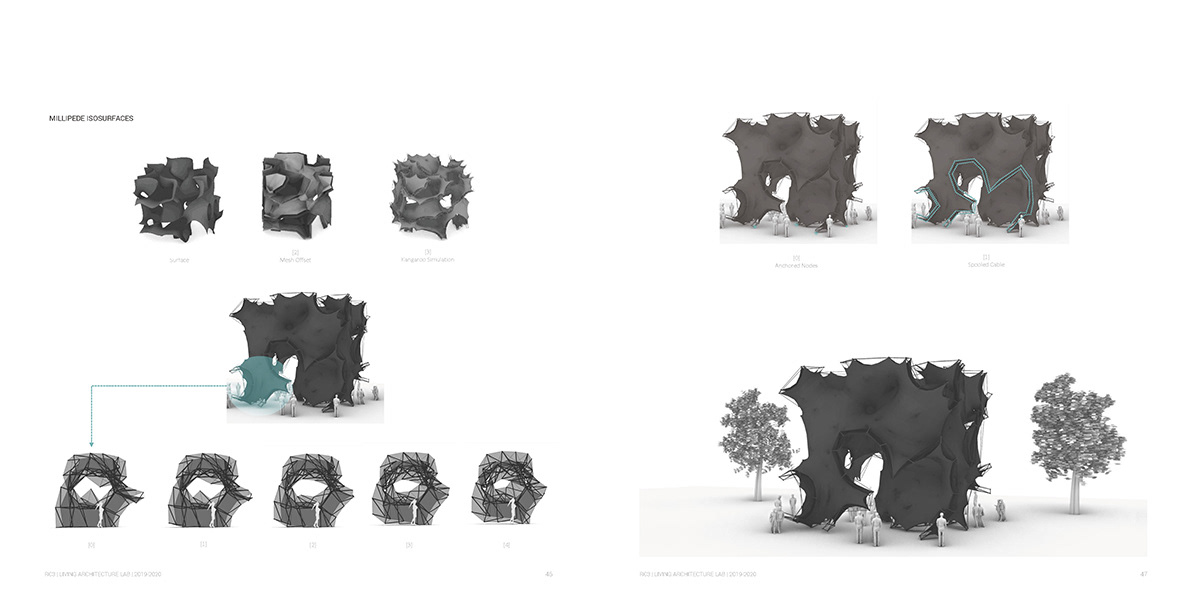
Tempo investigates autonomous spatial embodiment through a robotically controlled hybrid tensegrity system. It aims to understand how human-body movement can influence space quality. Tempo offers a performing space that responds to its immediate environment regarding the users' physical activity through a sensory actuated system.
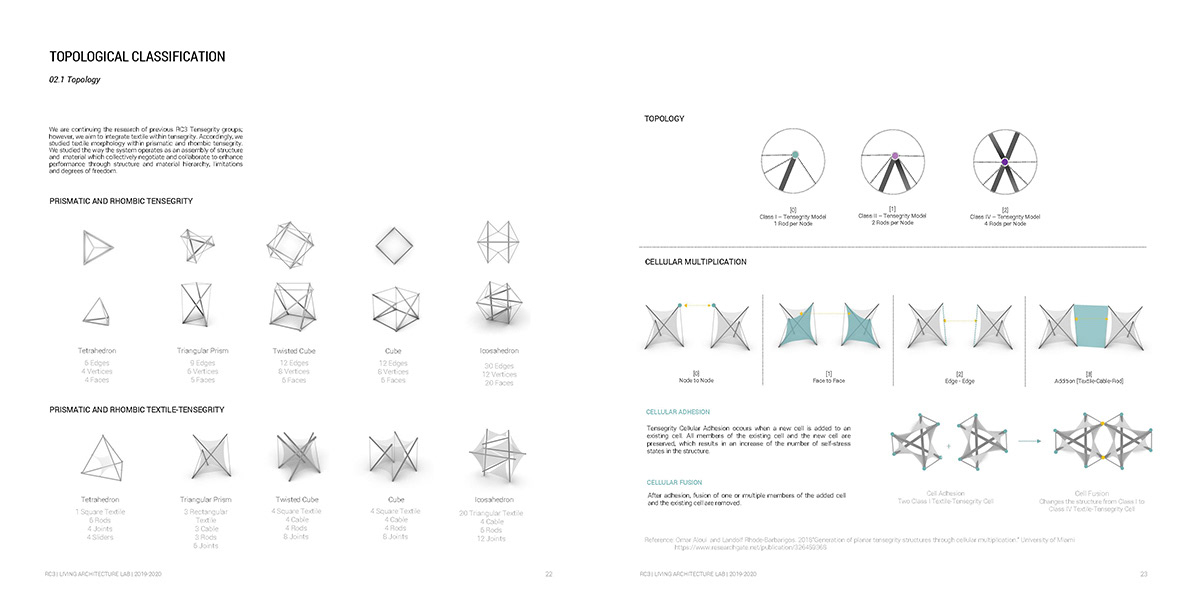
Under the theoretical framework adopted from Greg Lynn's 'Architecture itself as a Giant Robot,' the project capitalizes on the question of architectural emergence through the symbiosis between human and non-human behavior. It is considered a second-order cybernetic architecture with its autonomous ability. It is made self-aware through a sensory system that provides feedback on the spatial body's internal state and environmental state. The structure is a continuously evolving spatial system that self-adapts with quantitative and qualitative elements of human and non-human behavior, constrained within the material body's degrees of freedom.
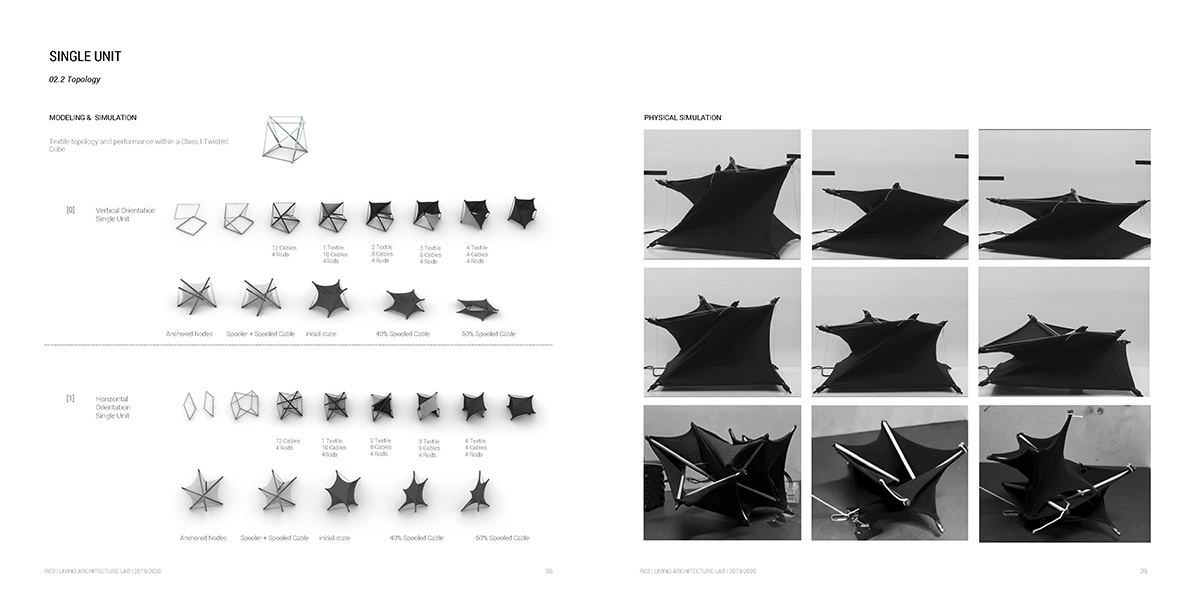

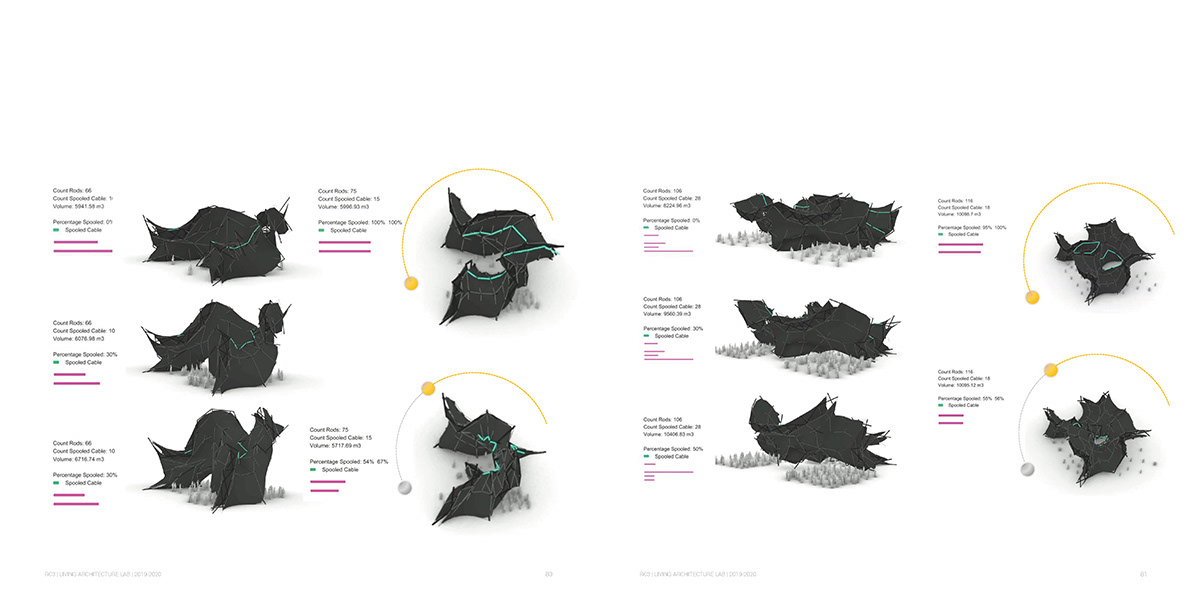
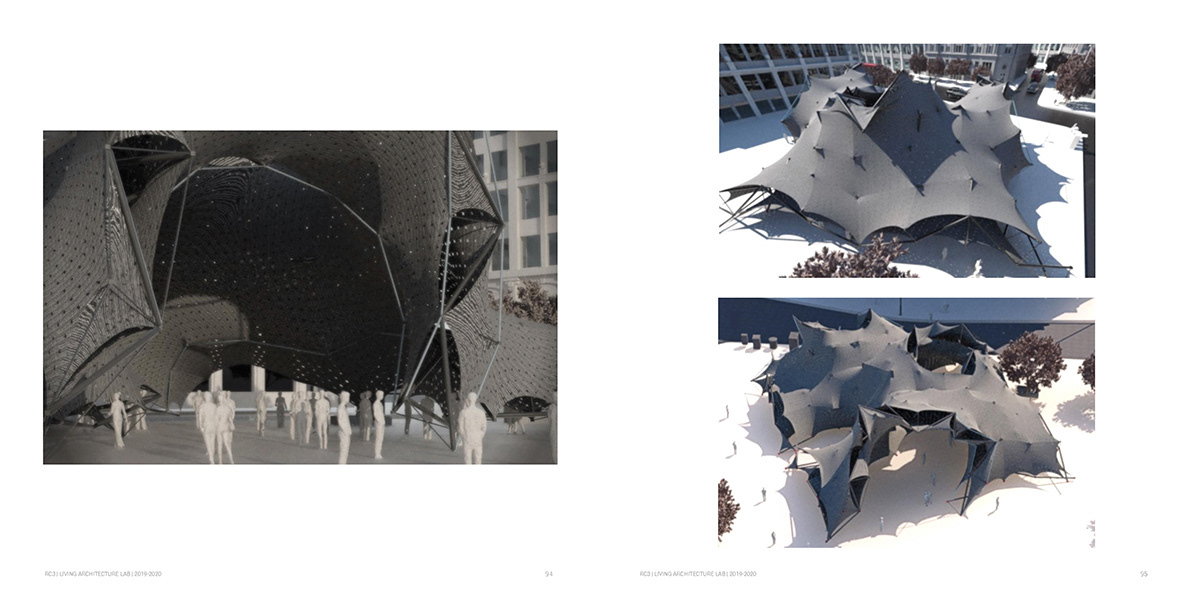
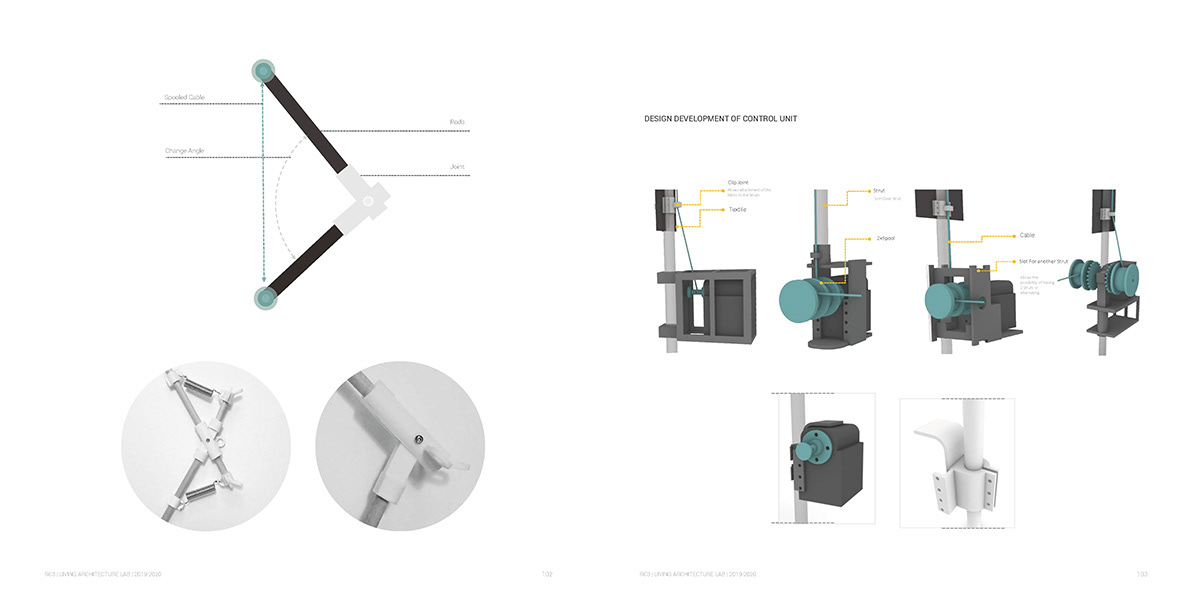
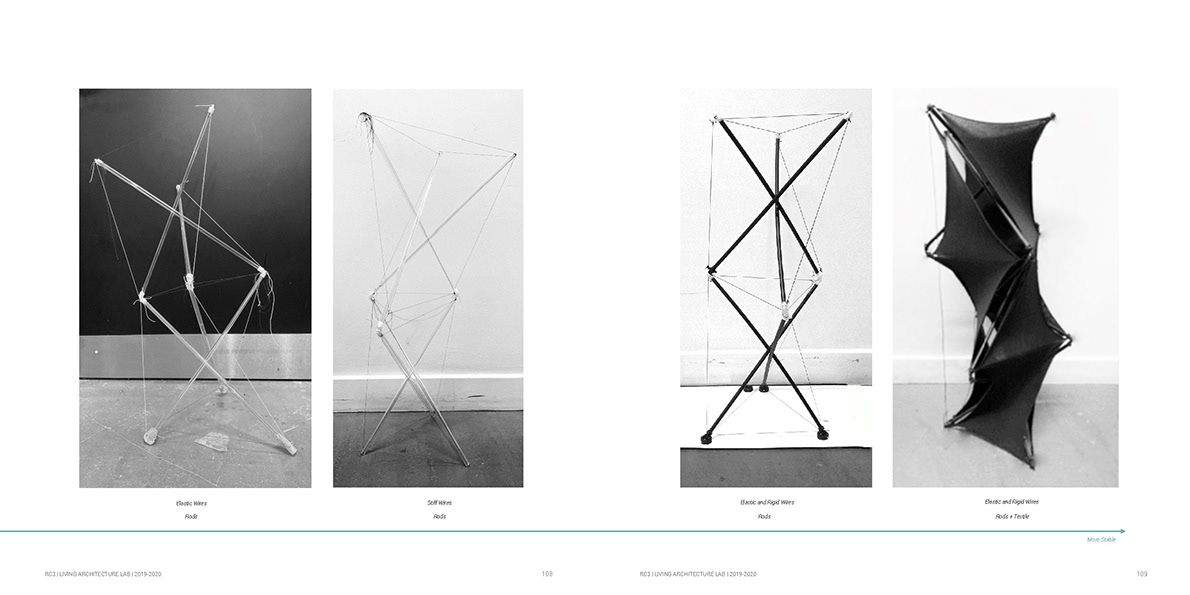
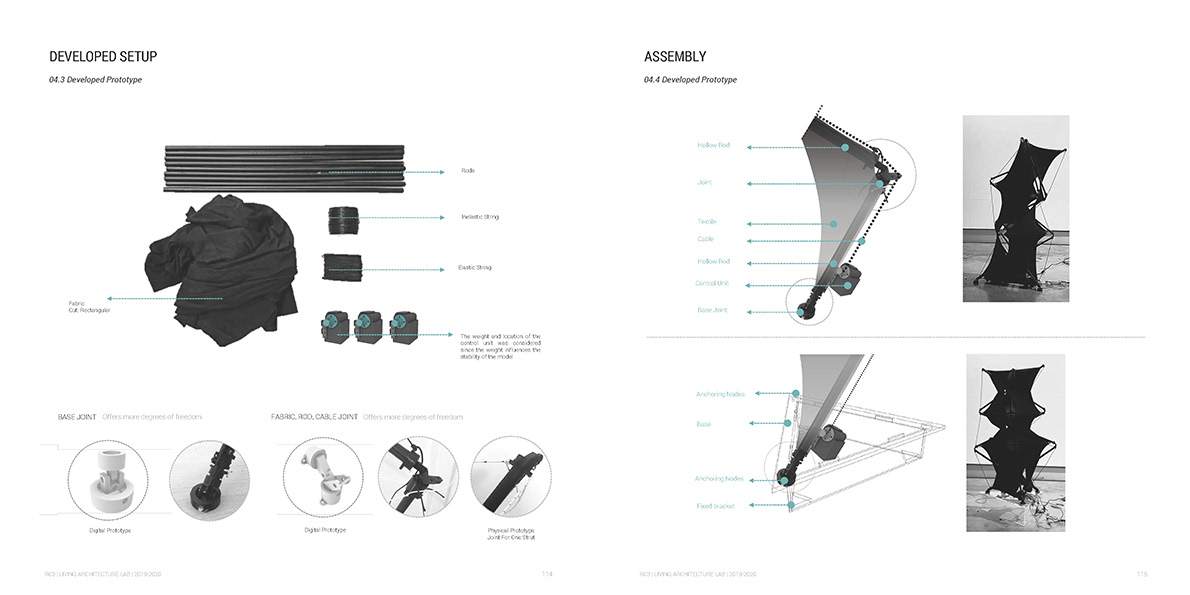
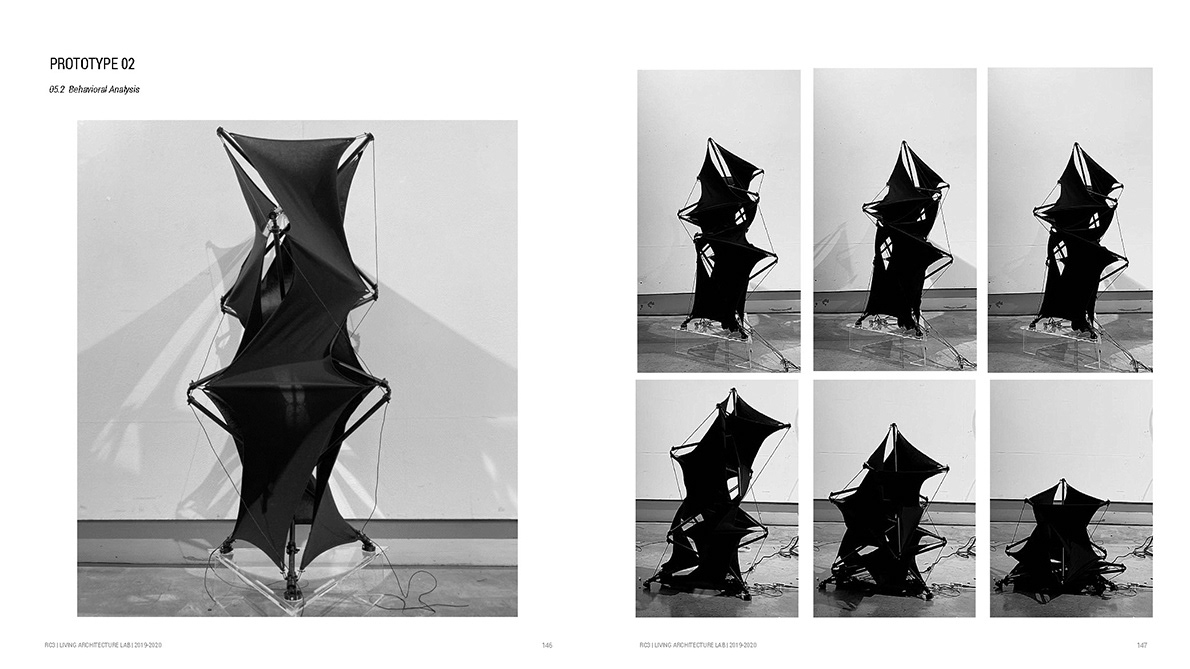
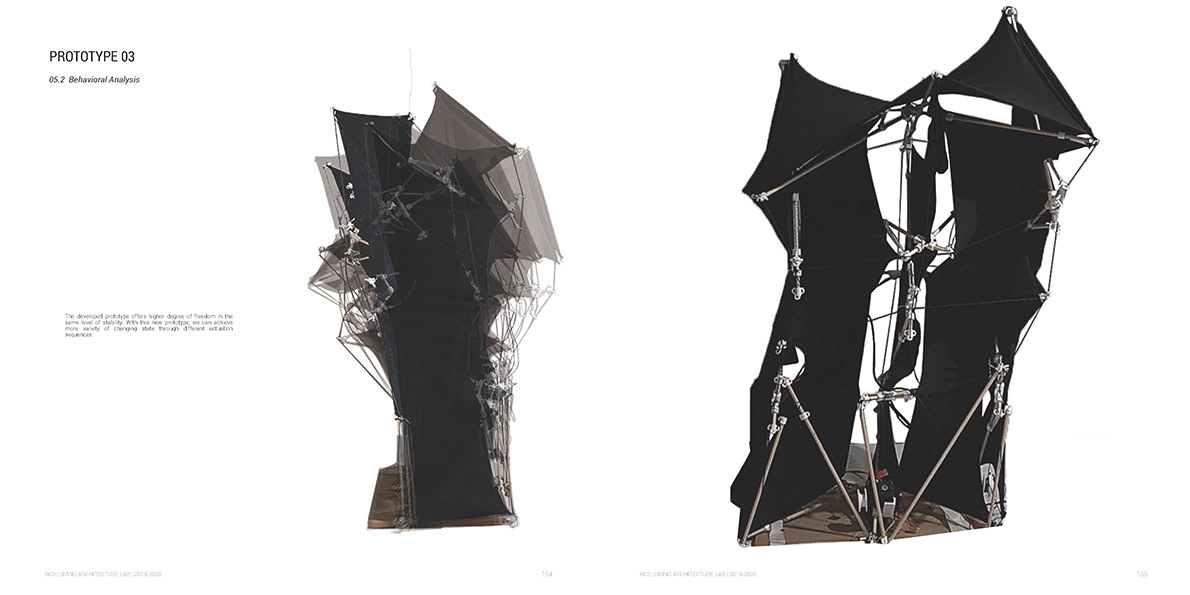
The structure is made by hybridizing the tensile and tensegrity system. It is done by changing the typical one-rod per node tensegrity topology to a combination of one-rod and two-rods per node. The addition of fabric as a part of the structure triggers structural equilibrium and stabilizes the whole system simultaneously. Through material research, its identified that textile can replace cables, ultimately becoming an active part of the structure.

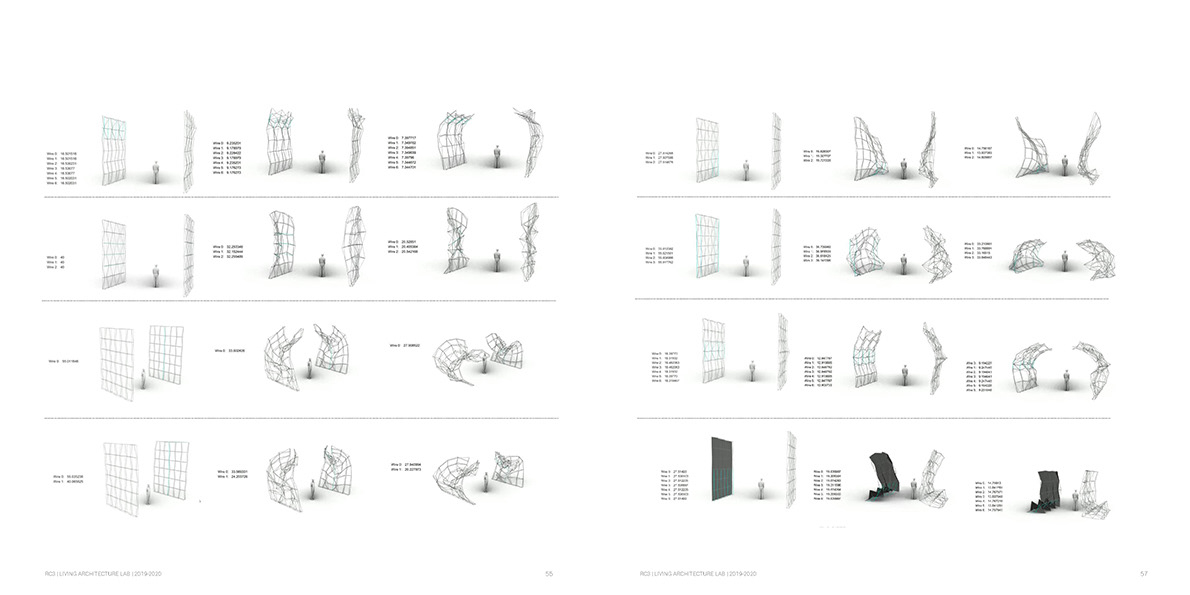

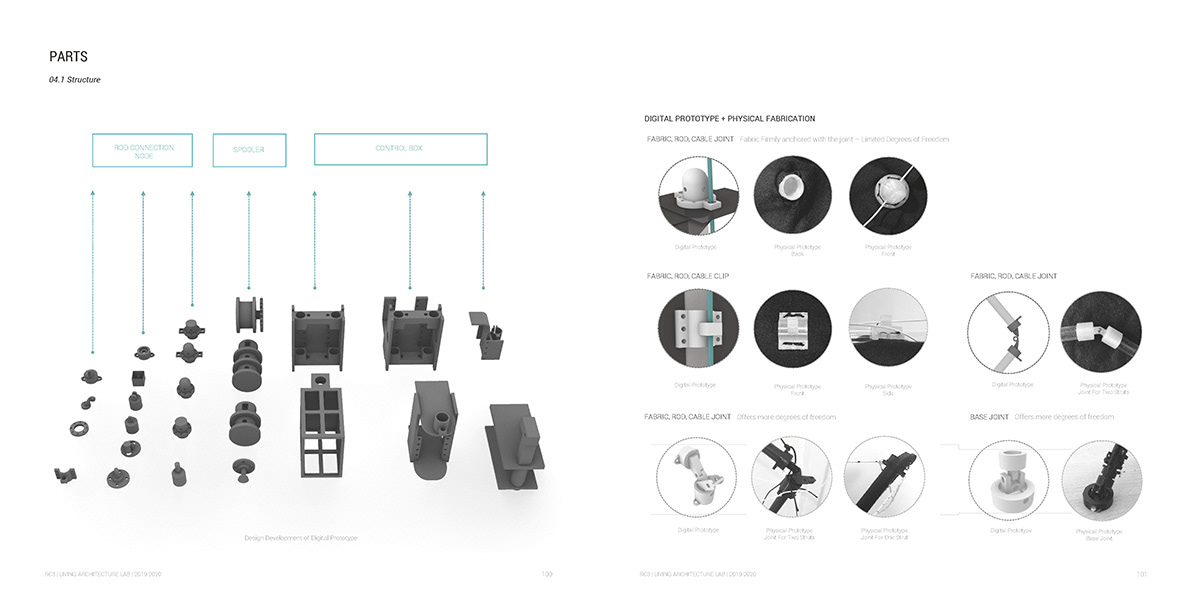
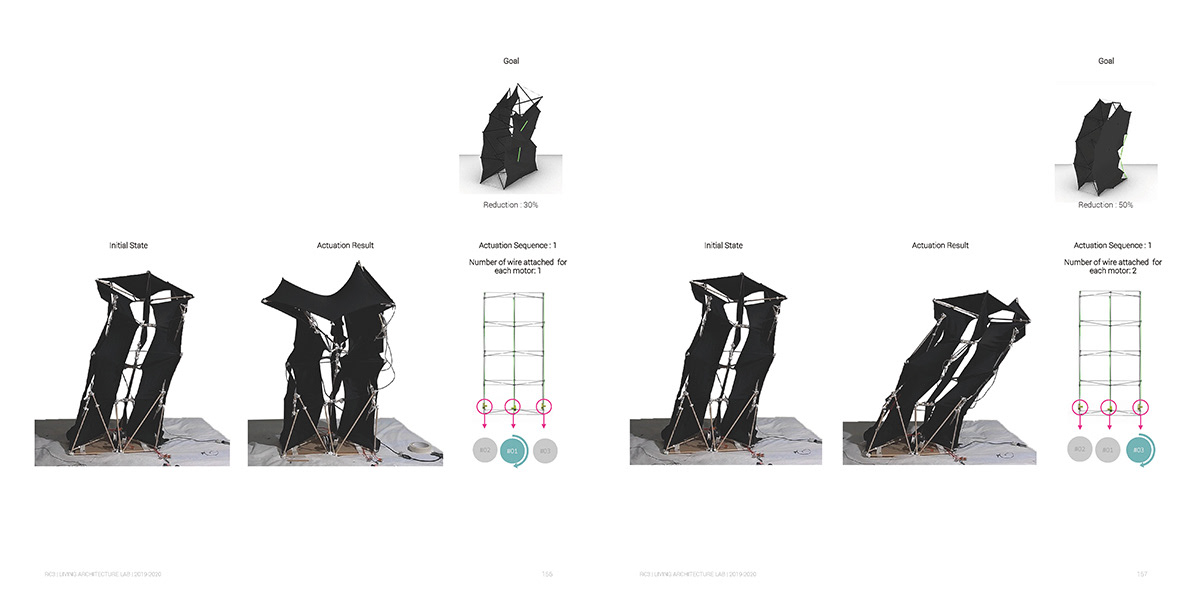
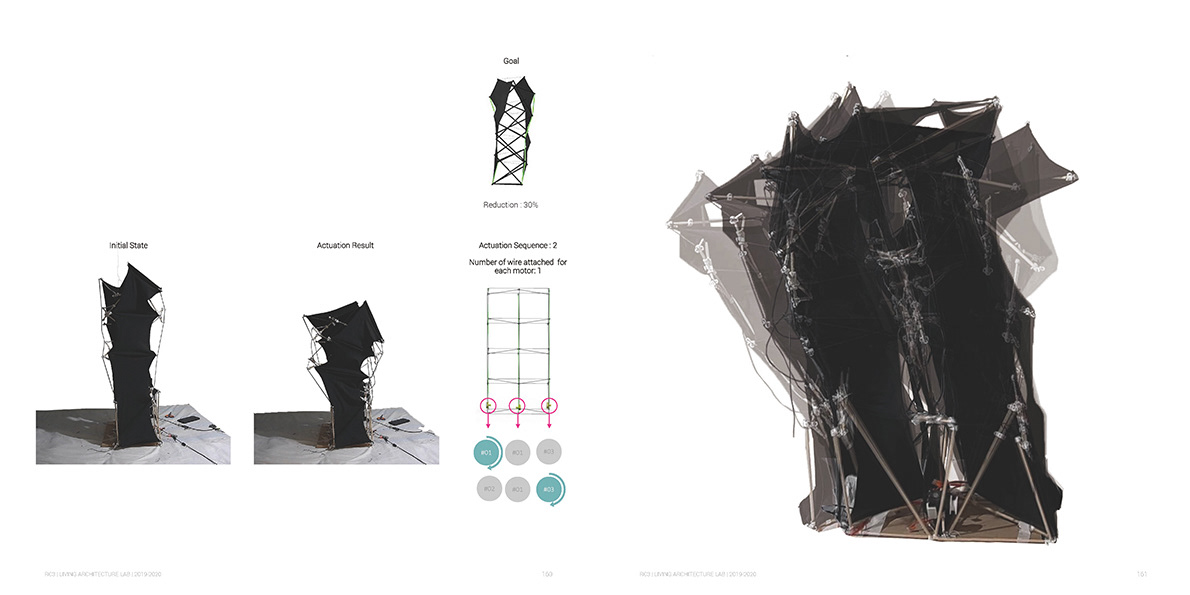
The overall research is investigated through the parallel development of robotic material prototypes, sensor actuated control systems, and a bespoke simulator's growth to be trained using reinforcement learning.